Last time on my ray tracer journey I made a simple C++20 program that could trace rays from a camera and test if they intersect with a sphere.
This time I will make the scene more interesting using UV coordinates.
UV coordinates of a Sphere
When a ray hits a sphere we can use some simple trigonometry to find the intersection point’s Uv coordinates on the sphere. Again, I will just link to Scratch a Pixel instead of repeating the math.
Let’s add a uv member to the Intersection class:
struct Intersection
{
...
Vec2 uv;
};
To be able to visualize the UV coordinates I calculate a checker pattern:
Vec4 checkerPattern(
const Vec2 &uv,
const int checker_count,
const Vec4 dark,
const Vec4 bright
){
const auto checker_x = int(uv.x * checker_count) % 2;
const auto checker_y = int(uv.y * checker_count) % 2;
const float checker = checker_x ^ checker_y;
return bright * checker + dark * (1-checker);
}
Then I can update the colorization code to use the checker pattern:
const auto darkChecker = Vec4{0.5,0.5,0.5,0};
const auto lightChecker = Vec4{0.8,0.8,0.8,0};
if (intersection.has_value())
{
const auto checker = checkerPattern(intersection->uv, 8, darkChecker, lightChecker);
setPixel(x, y, checker);
}
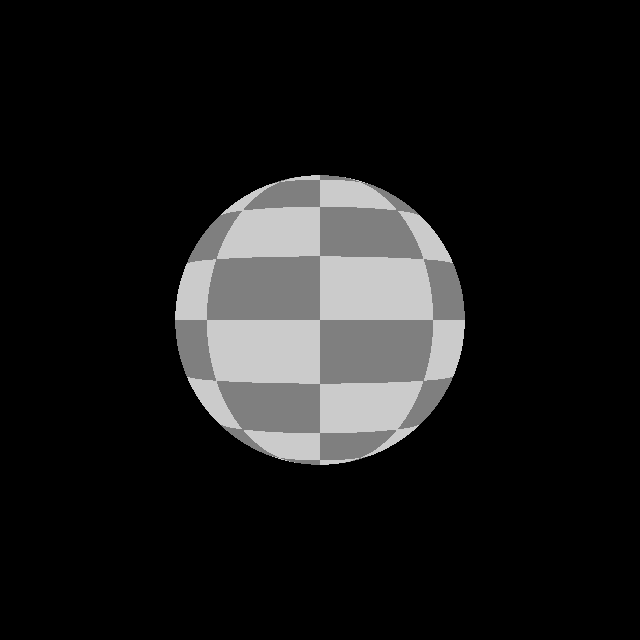
Running the updated code results in this checker patter on the sphere:
Square and Object
Spheres are great but I decided it would be nice to have more variety in the scene, so next up is adding squares.
struct Square
{
Vec3 p;
Vec3 n;
Vec3 right;
float size;
};
A square is described by its center, normal vector, tangential vector (I called it right) and size.
Computing the intersection between a square and a ray should be easy, so I also omit the math for that. There are many sources detailing it online.
The interface for the intersection testing is then:
std::optional<Intersection> getIntersection(const Ray &ray, const Square &square);
Now I would like to be able to handle squares and circles in a generic way so I introduce an abstraction, objects:
using Object = std::variant<Circle, Square>;
Using std::variant over virtual inheritance has the advantage of not needing dynamic allocation and easier to use in GPU code later.
Later if I add more object types I can just extend this definition.
To dispatch an intersection call to the correct type contained in the variant I use std::visit:
const Object obj = ...;
const auto intersection = std::visit([&](auto&& o) {return getIntersection(ray, o);}, obj);
Rendering many objects
Let’s replace our single sphere with a list of objects:
std::vector<Object> objects;
objects.emplace_back(Square{
.p = Vec3{0,0,2.5},
.n = Vec3{0,0,-1},
.right = Vec3{1,0,0},
.size = 1,
});
...
Let’s factor out the ray casting from the rendering, while making sure to find the closest intersection:
std::optional<Intersection> cast(const Ray &ray)
{
std::optional<Intersection> best = std::nullopt;
for (const auto &obj : objects)
{
const auto intersection = std::visit([&](auto&& o) {return getIntersection(ray, o);}, obj);
if (!intersection.has_value()) continue;
if (!best.has_value() || best->t > intersection->t)
{
best = intersection;
}
}
return best;
}
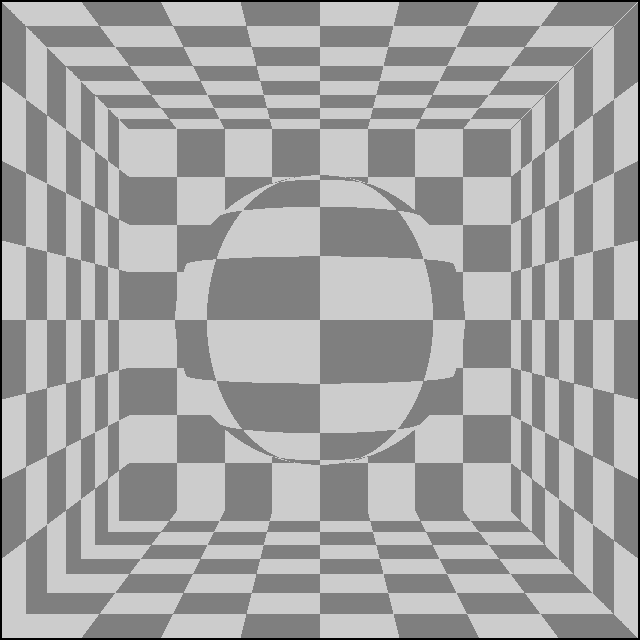
Putting it all together yields a render of a checkerboard room:

This time I introduced a new abstraction to be bale to handle different kinds of objects. I also extended the renderer with squares. Next up I will introduce basic materials to the renderer.